Японцы создали робота, который позволяет почувствовать изображённое на экране
Гуманитарные новости 23 Дек 2010Учёные из университета Гифу и лаборатории Мури (Япония) сообщают, что HIRO III является «роботом с тактильным интерфейсом», который может передавать реалистичные ощущения прикосновений через связь с пальцами пользователя. Для обеспечения визуальной поддержки используется сенсорный 3D экран.
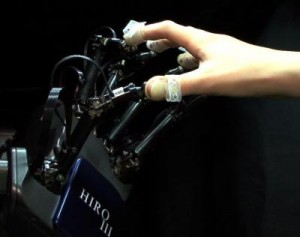
Робот является рукой и кистью с пятью пальцами, к которым пристёгиваются специальными ремешками пальцы человека. Пальцы робота передают пользователю тактильные ощущения, имитируя текстуру поверхностей, размер виртуальных объектов и чувство тяжести. Система интегрирована с трёхмерным дисплеем, передающим изображение руки пользователя. Рука на экране отображается в том же положении, в котором на самом деле находится рука человека, что делает получаемые ощущения весьма реалистичными.
Каждый палец робота может выполнять 15 степеней движений, каждая рука – 6. Это позволяет механизму оперировать на достаточно большом пространстве под экраном. Движения робота контролируются 15 моторами, работающими одновременно.
Устройство может найти применение на заводах для выполнения автоматизированных операций, в имитировании процедур медицинской диагностики во время обучения. Учёные надеются, что разработка поможет в обучении студентов-медиков, особенно в получении навыков проведения тактильного осмотра груди пациентов с целью выявления рака.
Страницы: 1 2

{kind=link}